Home > Exercises Chapter 2 > Exercise 1
Exercise 1
Exercise 1 consists of the coding and testing of a numerical integration (quadrature) program. Part (a) concerns integration of a polynomial over the 1-D standard element [-1,1]. My code for exercise 1a can be found here. I did this via the definition of four functions. The first is called
dvector,
it allocates memory space so that the pointer which uses this function
can be a vector of double precision elements with the length of the
argument of dvector. Thus the line:
z = dvector(3);allocates enough memory to the pointer
z to be
a vector of three double precision elements, the first being z[0]
and the last z[2]. The second function I use
is the zwgll function which is explained in
the z
and w will be filled with the np
integration points and weights. Now it is time to specify the function
which has to be integrated. For this I made a function called func
which fills the double precision pointer p
with the values of ksi^6 at the np integration
points. By the way, in my codes, functions which fill pointers/vectors
are defined as void pointerfunctions, so for
example the declaration of func looks like
this:void *func(int np, double *z, double *p);These
void functions only change the values at
the adresses at which their (pointer)arguments point, so a return
statement is not necessary. This is different in the fourth function I
used which is called integr. This is a double
precision function which has got a return statement. It returns the
value of the integration! When using this type of function the
statement:integr(np, w, p);will thus be interpreted as the value of the integration. In this case it will be the integration of
p using np
points and weights w. For part (b), the integration of a polynomial over a non-standard interval, a couple of additions have to be included in the code (which can be found here). Because a mapping function has to be defined we need three extra variables. First a vector is needed to contain the x-coordinate, this is, as usual, done via a double precision pointer
x (from now on every
variable will be of double precision by default, it will be mentioned
when this is not the case). Then we need the Jacobian of the mapping
which is defined as a one element vector Jac. The
two-element vector bound will contain the boundaries of
the integration domain, the left boundary will be bound[0]
and the right boundary will be bound[1]. In my code(s)
the boundaries are double precision, so to prevent any problems it is
best to state them in decimal form. Of these extra
variables Jac and x will be determined in
the mapping function chi and bound can be
given any desired values. Equation (2.31) of chapter 2 of the book
specifies the mapping chi and this is just what the function chi
does (and of course calculating the Jacobian).When part (a) and part (b) are completed succesfully part (c) should not be a big problem. Here is my solution. It has only minor changes in comparison with part (b). The changes are the domain, (in the
bound vector) which is
now [0,pi/2] and the function in func, which now is a
sine function. Don't forget to include math.h and
remember that pi can be collected by the macro M_PI.
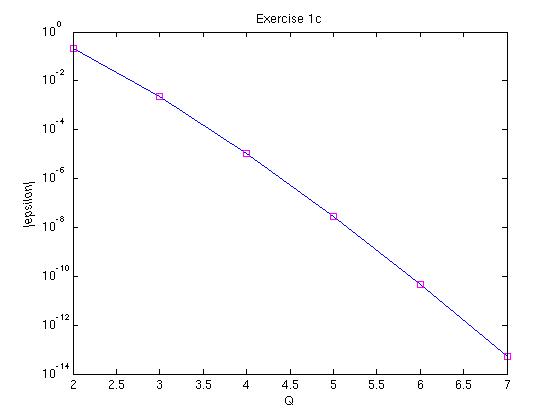
Underneath my plot can be seen of the absolute value of the error
epsilon on the
(logarithmically scaled) vertical axis versus the number of GLL
integration points Q. As expected (and explained in exercise 1c) the
line is approximately straight.